
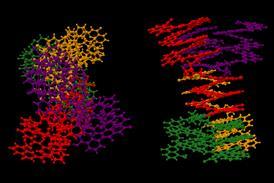




站在只有几厘米高,一个人形图漫步烧杯中利用其长臂来推动自己前进。这个小软机器人是由改变形状的水凝胶在电场和是由研究人员来自美国和韩国,也设计了一个微型夹持和易怒的运输车。
柔软的机器人更善于处理的对象和模仿生物运动比那些由金属或塑料。小型版本可以用来处理单个细胞或药物人体的特定区域。但是机器人需要控制在某种程度上,最好是没有添加外部组件。研究人员一直在观察变形材料响应刺激如温度、pH值,实现这一目标。
Howon李来自罗格斯大学和他的团队使用了一个电活性水凝胶微型沃克。放置在一个生理盐水,人类在21分钟图走12毫米电场。它改变行走方向电场时逆转。
李的团队创建他们的3 d结构聚合液体前体混合分层技术紫外线照射下。水凝胶的运动是基于其溶胀行为。羧酸集团移动阳离子聚合物使大量。在电场中,这些被吸引到阴极,创建一个在水凝胶浓度梯度。这导致来自不同方面的渗透压力的不平衡和不均匀膨胀,使整个结构弯曲向阴极。
研究人员发现,厚的水凝胶,它弯曲的慢。他们使用这个概念也竖起两指爪,手指向另一个,使用两组对立的刚毛的运输车小物体移动。
引用
维汉等,ACS达成。板牙。接口,2018,DOI:10.1021 / acsami.8b04250






还没有评论