
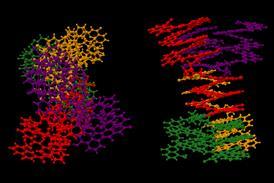


远程控制的微型机器人使用气泡控制和组装sub-millimetre大小的组件。
引人入胜和操纵sub-millimetre对象在微型机器人是一个棘手的问题。机械抓在微观层面是困难的,和技术如微电机触手,虽然非常准确,需要拴在一个控制系统,因此不适合在密闭空间工作。
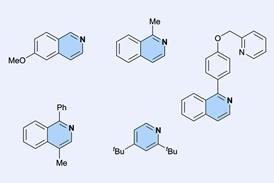
为了克服这些问题,Metin斯蒂和他的团队从德国马克斯普朗克研究所已经开发出一种无线微、使用表面张力,而不是机械手段,抓住小部件,比如头发,布纤维或一块肌肉组织。夹在水环境中工作,可以抓住两个亲水和疏水的物品,不像其他的系统,不需要定制适合的项目。
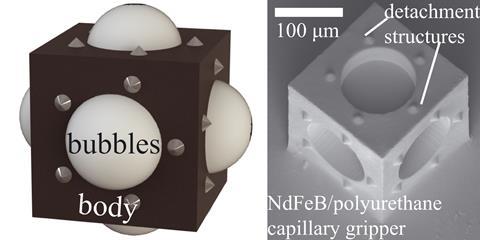
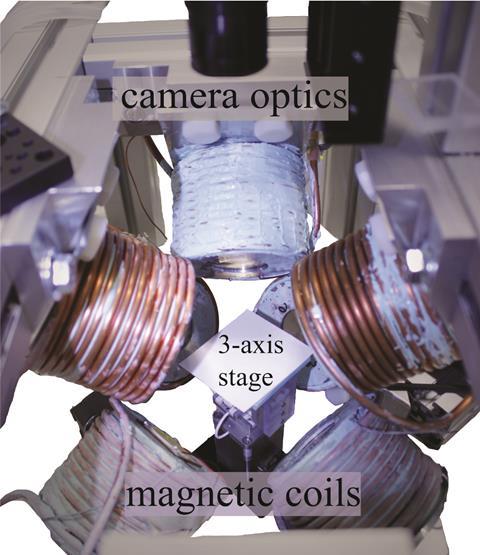
爪是一个立方体的形式与身高仅200µm。3 d印制的钕磁合金颗粒的混合物和聚氨酯,爪可以移动使用电磁线圈。腔的立方体捕获空气泡沫立方体浸在水里。这个泡沫带来了与另一个对象时,毛细管力作用下把对象立方体。
爪释放货物,研究人员增加了系统的压力,压缩腔内的泡沫,从货物的表面剥落。小疙瘩爪表面防止粘附货物项太多了。
斯蒂有表面张力夹的想法当他注意到其他微型机器人设计在过去有时会被困在水面上了。我们确定机器人变得与自然发生的小气泡在准备工作区。然后我们研究如何使用这些强大的力量在微米尺度扣人心弦和释放部分,”他解释说。
系统的控制对象的不同形状和大小的能力意味着它可以使用在许多不同的领域。广博商贸郝,机器人专家和他们的应用程序在科克大学精密工程,爱尔兰对这个系统的应用:“该方法创建一个新的或替代有效的解决方案组织制造、微加工,和微创手术”。
斯蒂旨在改善释放机制,使用本地温度控制改变泡沫的大小。他也有野心和两个分别控制触手的开发一个系统。




还没有评论